
Many Roomba vacuum cleaners have an issue of a side brush failure, the majority of the malfunctions are cracked or broken plastic reduction gears and a few are actual motor failures and these issues are well documented by various internet sources, replacement gears and motor assemblies are available on the internet. However, I have recently repaired a Roomba Model 805 with an H-Bridge motor driver failure. I could not find any reference to transistor driver problems on the internet, so maybe this can help others with the same issue. I could not find any schematic diagrams for any of the recent series of Roombas on the internet, hopefully this will make up for the lack of information that is on the web.
A short explanation of transistor and H-Bridge current motor control:
If a motor only needs to turn in one direction then only one transistor or MOSFET driver is needed (a pre-driver might be needed for higher current). To control a motor in both directions, then four transistors or MOSFETs are needed. An H-Bridge could be found using discrete transistors or as an integrated circuit chip, fly-back protection diodes are also necessary to protect the transistors from back EMF, (some MOSFETs have diodes built in).
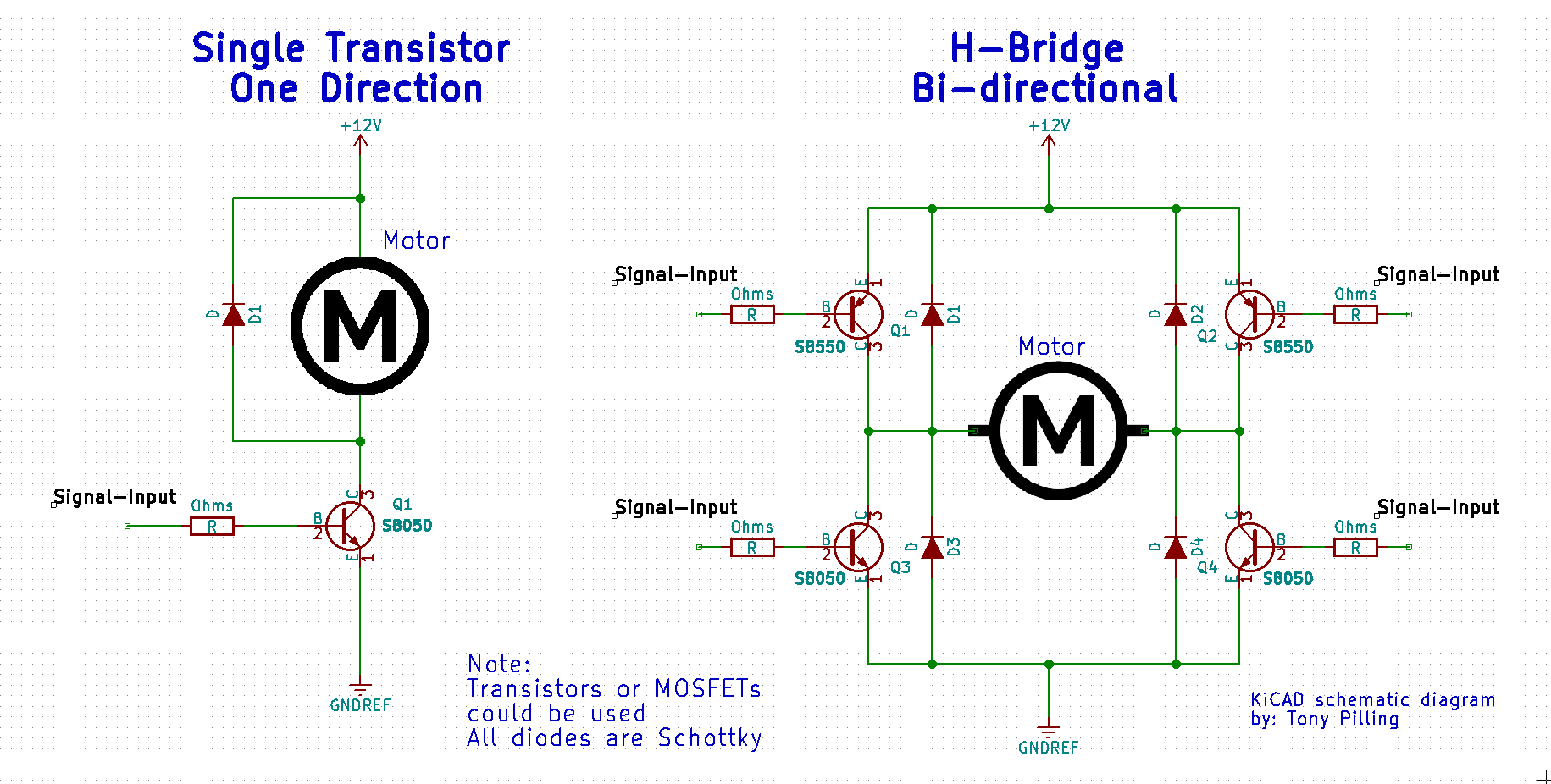
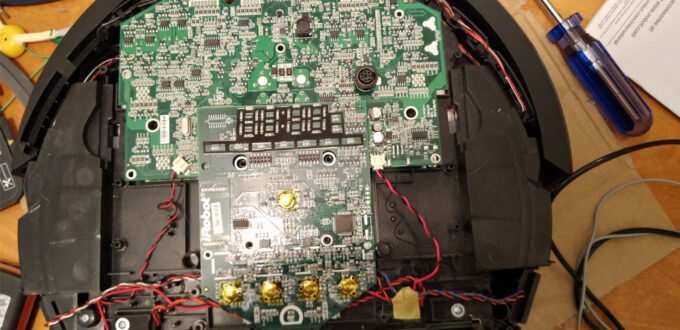
The side brush motor driver circuit found in the 805 models is the classic 2 PNP and 2 NPN transistor H-Bridge with diode fly-back protection. In this particular Roomba 805 I found a failed SS8050 NPN and a failed SS8550 PNP transistor. When purchasing replacement parts use TO-92-3 package, which are usually rated at 1 watt.
![]()
I found a 100 uF capacitor at C284 (next to the H-Bridge) on the circuit board that measured lower than normal capacitance and the ESR was slightly out of spec, so this was replaced also, check this capacitor on your model to be sure.
I believe the transistors failed due to the side brush getting caught in something, most likely the Roomba traveling over a sock or T-shirt on the floor and jamming the side brush stationary, while the motor strains to overcome the resistance. This stress either overheats the motors or breaks the plastic reduction gears in the motor assembly or because of the high resistance and stalling of the motor, the driver transistors burn out due to an increase in electrical current.

As a side note:
I don’t understand why the designers chose to incorporate an H-bridge for the Roomba side brush. The only function of the side brush is to spin counter clockwise to push dirt and debris from the right side into the path of the vacuum pickup roller brushes as the robot moves forward. I see no need to reverse the direction of the side brush even if the robot momentarily reversed direction. If I was to design the Roomba I would have chosen a single higher watt driver transistor for just turning the brush in one direction to make it more robust and simpler. However I like the modular construction of the Roomba, some parts are compatible with other models and it is hackable.